
参考#
介绍#
CV中有一种特征估计和学习的方法叫做Optical Flow-光流,通常是用于获取视频相邻帧的信息。
现在有的应用场景有:
- 自动驾驶和智能交通:可以通过相机分析周围车辆、行人等的运动来辅助驾驶;还可用于建模周围的3d场景,用于自动驾驶的环境理解。
- 视频监控与安防:检测异常行为、分析运动轨迹。
- 机器人导航和SLAM:和自动驾驶差不多,场景地图建模、避障、环境学习。
- 医学影像分析:血液器官的微小运动。
- 视频压缩与处理:通过存储帧间差距来编码,减小存储;稳定视频、补帧等。
- 体育动作微表情分析:光流估计人体运动姿态、表情等,可以识别动作或者分析动作语义等。 这篇文章简要介绍一下背后的原理,作为引导。
运动场#
$$ \frac{r_i}{f} = \frac{r_0}{r_0 \cdot z} \tag{1} $$$$ v_i = \frac{d r_i}{d t} = f \frac{(r_0 \cdot z)v_0-(v_0 \cdot z)r_0}{(r_0 \cdot z)^2} $$$$ v_i = f \frac{(r_0 \times v_0) \times z}{(r_0 \cdot z)^2} \tag{2} $$Optical Flow:Motion of brightness patterns in the image.
理想情况下,光流和运动场是相同的,例外如:一个球在固定光源下旋转;一个球固定,光源旋转。
两帧之间的像素点位移速度矢量场,其中方向和大小表示了像素点的运动方向和速度。
光流限制方程#
假设#
- 光度一致性: 运动物体在相邻帧之间的亮度不变,假设光照不变。 $$ I(x,y,t) = I(x+dx,y+dy,t+dt) \tag{3} $$
- 小位移和小时间: 物体在相邻帧之间的位移和时间间隔都很小,假设相邻帧之间的运动幅度小。
其中u、v是光流矢量的x、y分量,表示像素点在x、y方向上的速度。
计算偏导\(I_x\ I_y\ I_t\)#
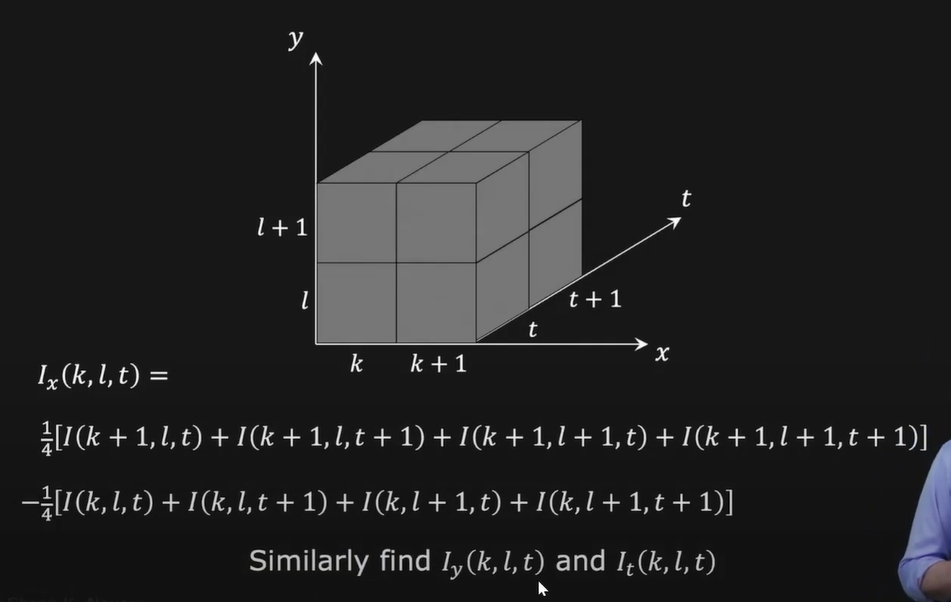
以四个像素的两帧图片为例,计算偏导数。
可以看到这一个方程有两个未知数u、v,是一个欠定方程组,目前无法求解。
补充#
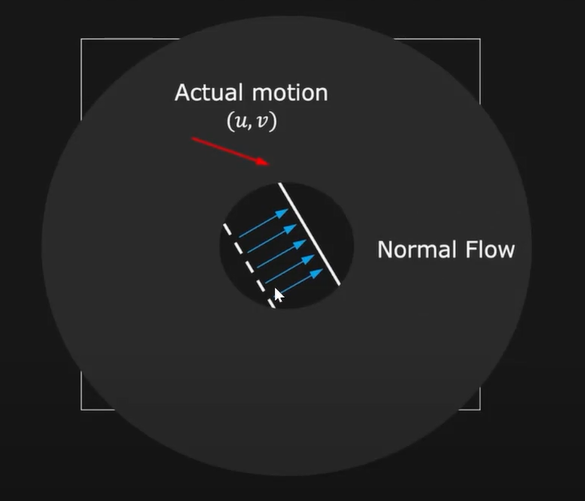
法线流和平行流#
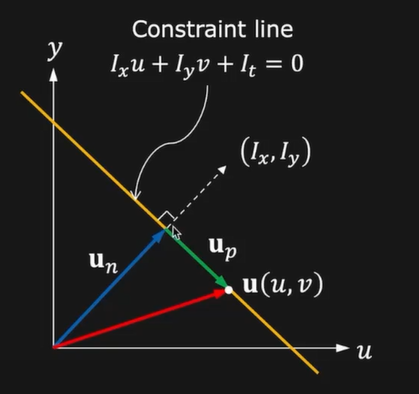
Aperture Problem#
Lucas-Kanade方法#
$$ I_x (k,l) u + I_y (k,l) v + I_t (k,l) = 0 \tag{8} $$使用矩阵形式表达(W大小为nxn):
$$ \begin{bmatrix} I_x(1,1) & I_y(1,1) \\ \vdots & \vdots \\ I_x(k,l) & I_y(k,l) \\ \vdots & \vdots \\ I_x(n,n) & I_y(n,n) \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} = - \begin{bmatrix} I_t(1,1) \\ \vdots \\ I_t(k,l) \\ \vdots \\ I_t(n,n) \end{bmatrix} \tag{9} $$$$ Au=B $$$$ u = (A^TA)^{-1}A^T B \tag{10} $$When does Optical Flow estimation work?(可自行了解)
- \(A^TA\)可逆
- \(A^TA\)良态
不适合光流估计的情况:
- smooth region
- edge region
适合做光流估计的情况: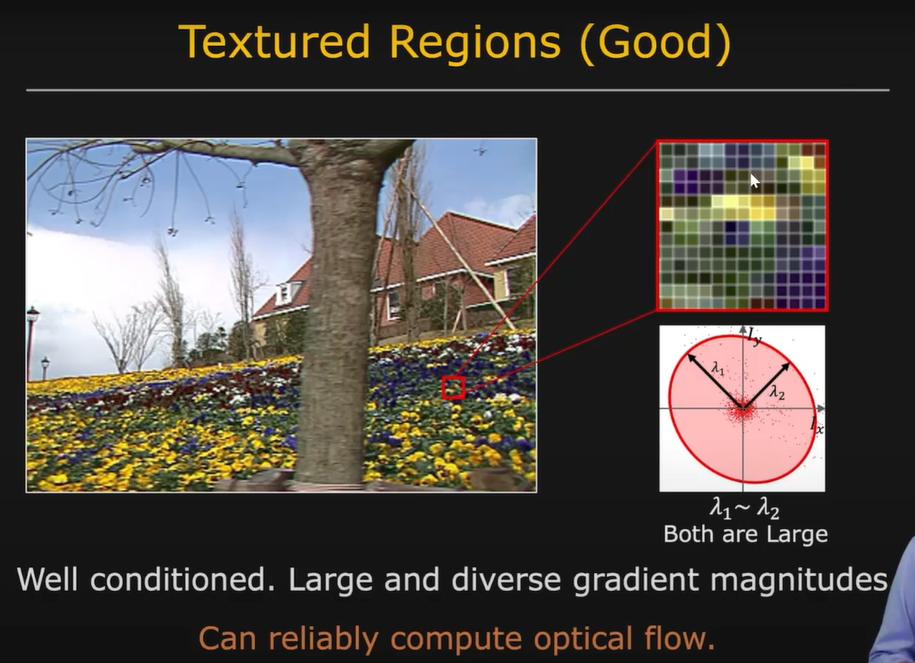
由粗糙到精细#
问题#
如果两帧图片的像素有一个大的运动怎么办?
下采样#

两帧都下采样之后,像素的motion就会很小了,因为移动单位是看的像素点的位移格子个数。
然后就可以用之前的光流限制方程计算。
由图像金字塔的概念,逐层下采样和计算光流。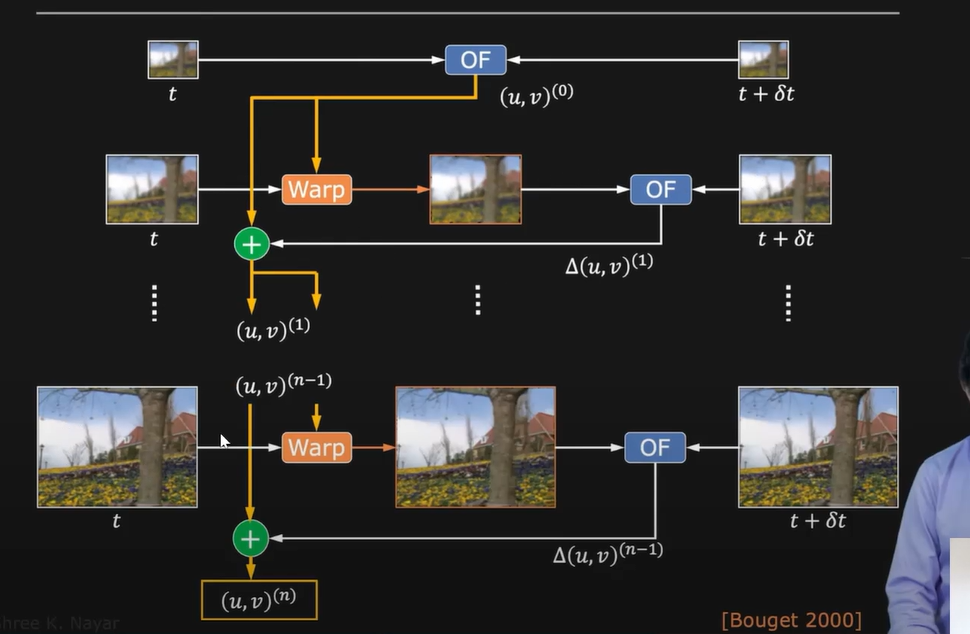
模板匹配#
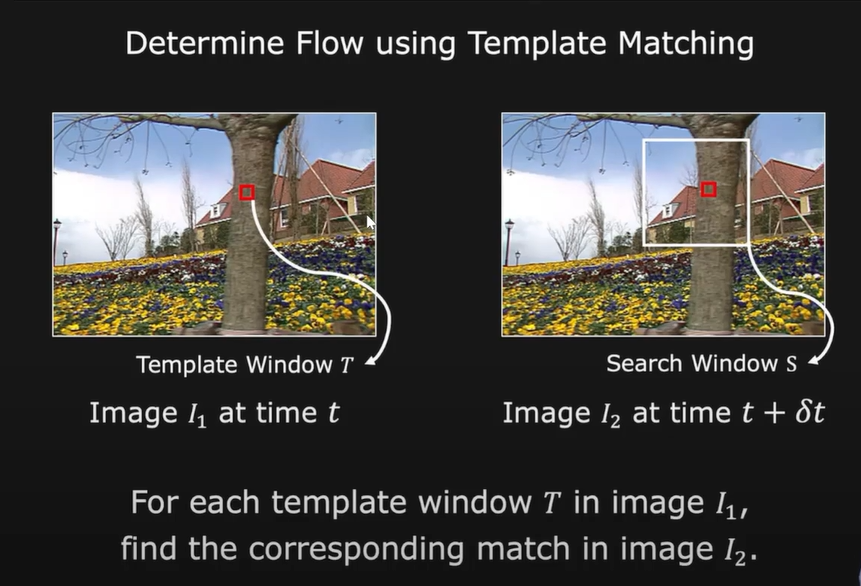
缺点:计算比较慢;也有可能会出现错误匹配。
代码#
使用Opencv中的calcOpticalFlowFarneback函数实现Lucas-Kanade光流估计检测车辆运动。
每两秒重新检测角点,新的车辆进入画面也能检测到。
import cv2
import numpy as np
import time
# 读取视频文件
cap = cv2.VideoCapture('test.mp4')
# 获取视频帧率(FPS)并计算2秒对应的帧数
fps = cap.get(cv2.CAP_PROP_FPS)
frames_per_3sec = int(fps * 2) # 每2秒的帧数
# LK光流参数
lk_params = dict(
winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)
)
# 随机颜色(用于绘制轨迹)
color = np.random.randint(0, 255, (100, 3))
# 初始化
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, maxCorners=100, qualityLevel=0.3, minDistance=7, blockSize=7)
mask = np.zeros_like(old_frame)
frame_count = 0 # 帧计数器
start_time = time.time()
while True:
ret, frame = cap.read()
if not ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
frame_count += 1
# 每3秒强制重新检测角点
if frame_count % frames_per_3sec == 0:
p0 = cv2.goodFeaturesToTrack(frame_gray, maxCorners=100, qualityLevel=0.3, minDistance=7, blockSize=7)
mask = np.zeros_like(frame) # 清空轨迹(可选)
# 计算光流
if p0 is not None and len(p0) > 0:
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
# 筛选有效点
good_new = p1[st == 1]
good_old = p0[st == 1]
# 绘制轨迹
for i, (new, old) in enumerate(zip(good_new, good_old)):
a, b = new.ravel().astype(int)
c, d = old.ravel().astype(int)
mask = cv2.line(mask, (a, b), (c, d), color[i].tolist(), 2)
frame = cv2.circle(frame, (a, b), 5, color[i].tolist(), -1)
# 更新角点
p0 = good_new.reshape(-1, 1, 2)
# 显示结果
img = cv2.add(frame, mask)
cv2.imshow('LK Tracking (3s Reset)', img)
# 退出条件
if cv2.waitKey(30) & 0xFF == ord('q'):
break
# 更新前一帧
old_gray = frame_gray.copy()
# 释放资源
cap.release()
cv2.destroyAllWindows()
结果如封面所示。